Over the first few months of our season, our team has spent countless hours designing, building, and programming our base robot and attachments. While our team strives to create a robot that is as repeatable as possible, we recognize that creating 100% repatability on the robot is practically unachievable due to varying mat and table conditions. However, with the use of our various light and gyro sensors, we are able to minimize the error associated with navigation and mission completion.
| Zone | Missions | Points | Time in Base Before Mission (s) | Robot Running Time (s) | Total Mission Time (s) | Clock at End of Mission | Points per Second |
|---|---|---|---|---|---|---|---|
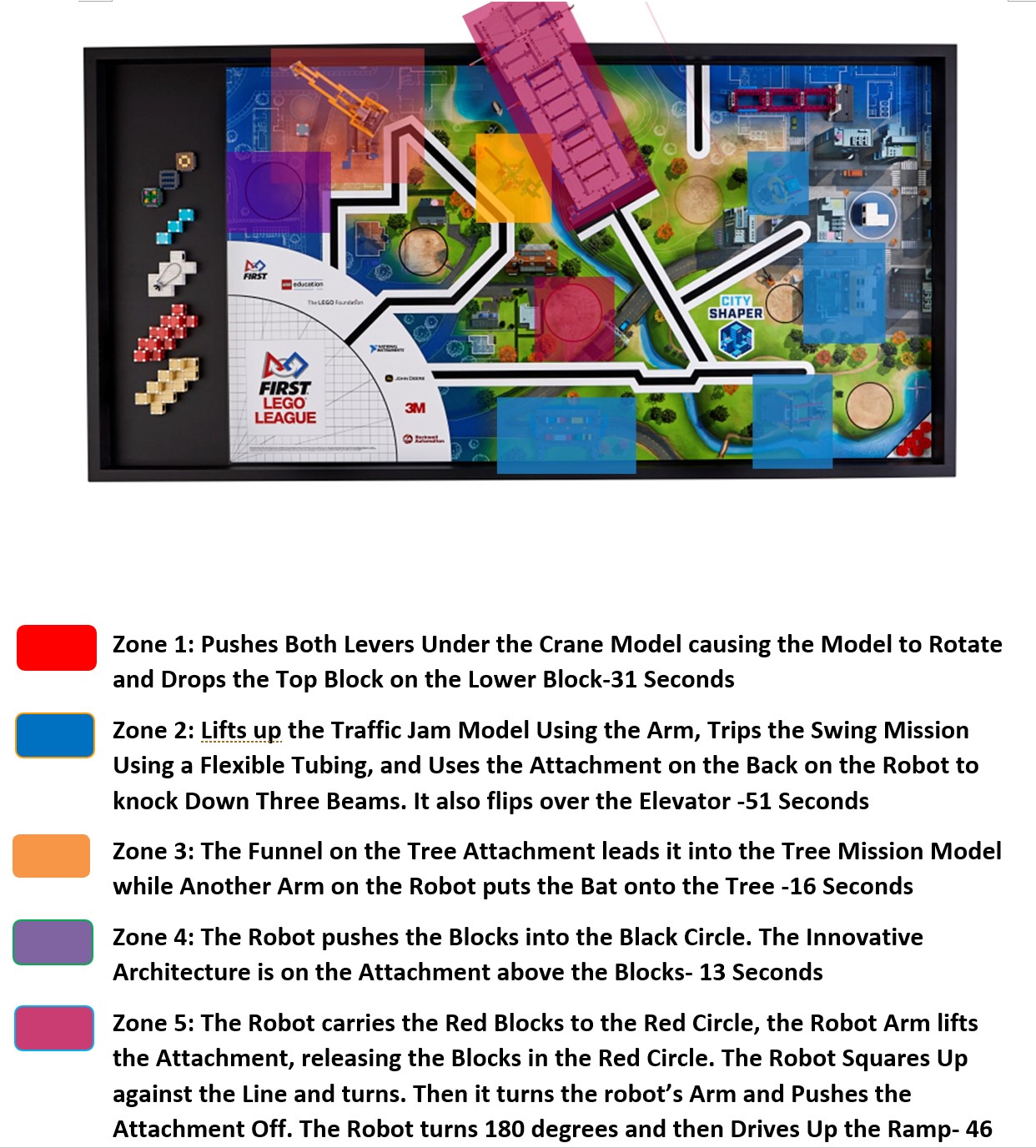
| Zone 1 | Crane | 60 | 0 | 31 | 31 | 0min 31sec | 2.61 |
| Zone 2 | Traffic Jam, Swing, Elevator, Safety Factor(3) | 95 | 7 | 31 | 38 | 1min 09sec | 1.94 |
| Zone 3 | Design for Wildlife, Tree Large(1), Tree Small(1) | 55 | 8 | 16 | 24 | 1min 33sec | 3.43 |
| Zone 4 | Design & Build(16), Sustainability Upgrades(3) | 125 | 6 | 7 | 13 | 1min 46sec | 17.14 |
| Zone 5 | Elevated Places + One Flag, Design & Build(10), Innovative Architecture, Precision(6) | 185 | 7 | 16 | 36 | 2min 22sec | 5.13 |
| Total | Elevated Places + One Flag, Crane, Design for Wildlife, Tree Large(1), Tree Small(1), Traffic Jam, Swing, Elevator, Steel Construction, Innovative Architecture, Design and Build(25), Sustainability Upgrades(3), Precision(6) | 500 | 28 | 75 | 143 | 2min 22sec | 3.52 |