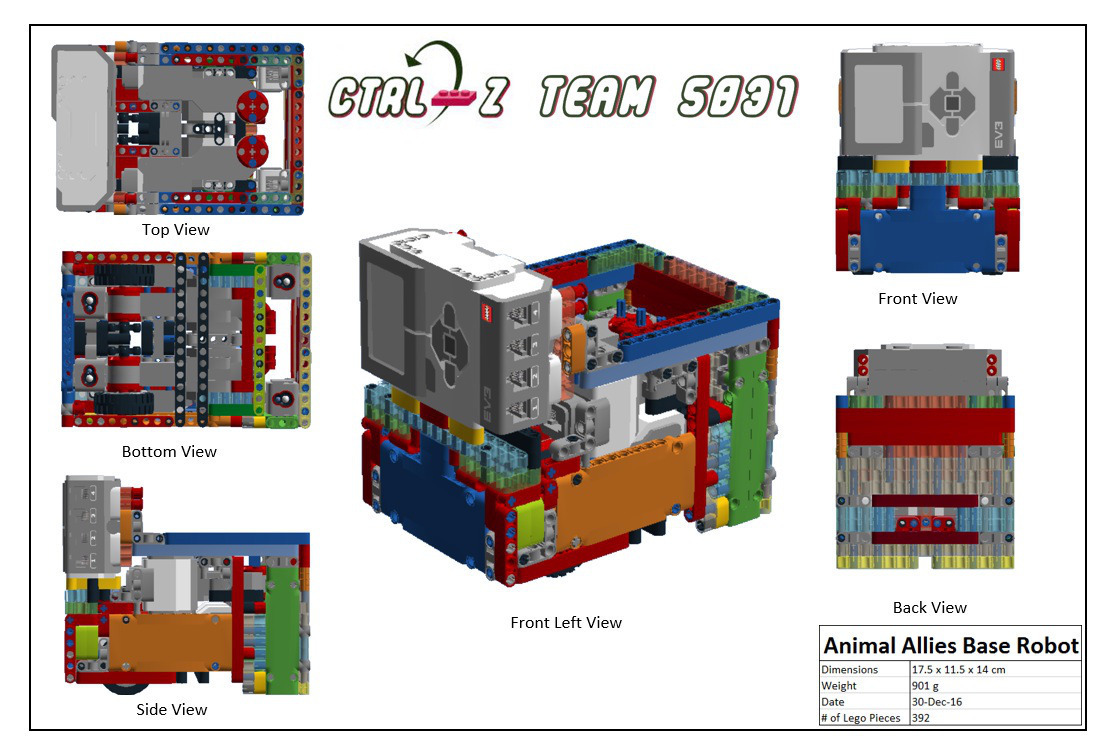
When designing our base robot, we establish criteria at the outset, such as desired footprint, height, balance, drive train, sensors to be used, user interface, etc. to arrive at a working prototype. We also strive to design and build a base robot which is robust and which features a frame around the chassis to provide structural rigidity as well as means to square up against walls and mission models. We design attachments keeping in mind that these attachments need to be easy to install and remove, robust, and both passive and multi-purpose whenever possible. From testing the prototype base robot and the attachments, we make revisions to our work in order to combine and speed up missions and increase repeatability to achieve maximum efficiency. By the end of the season, our attachments will often be in their fifth or sixth iteration.
When first designing our robot we wanted to make sure that all the light/color sensors behaved similarly. Color sensors each return small differences in readings because of variations in manufacturing. For example, if you were to place two different color sensors on the same black line, each would return different values for light intensity. Sometimes the difference may be significant. To make sure that all our light sensors had about the same reading we completely shielded ten color sensors to eliminate the variable of ambient light and recorded the reading for each of the color sensors on black, white, and green. We then found the four color sensors which have the closest reading to each other and used those four color sensors on the robot.
We have found the the green EV3 move blocks (Move Tank and Move Steering) are unreliable. Although they have a built in PID feature, they still do not move the robot in a straight line. To test this, we set a designated starting spot for the robot and then we ran it until it hit the wall on the other side of the table. We repeated this dozens of times and found that each time it would end up in a different spot on the other side of the table. Each time it would be up to one inch away from the previous run. Then, we made our own error-corrected move block (which you can read about in the programming section of this website). We conducted the same experiment using our block and found that there was much less error and the robot would consistently end up in the same position on the table.
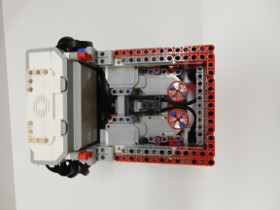
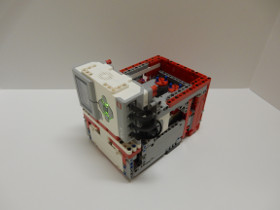
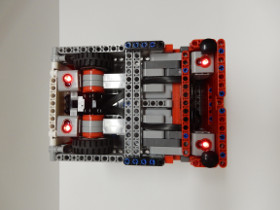
Our base robot is very robust and compact with a frame for strength. We also have four light sensors, for maximum flexibility, with shielding from ambient light. The robot has small wheels, which are steering neutral, and has narrow and hard wheels for more accuracy in both straight movements and turns. However, we sacrifice some speed due to our small diameter wheels which decrese the error associated with the drive motor rotation sensors. Our modular design, with use of Technic angular wheels, and attachment bay allow the robot driver to install and remove attachments quickly and accurately.


| Name of Attachment | Description | Picture |
|---|---|---|
| The Monstrosity | This is our largest attachment, employing a number of passive devices. The robot rides on top of it, driving the wheels on the attachment through a series of gears. It delivers the bee to the beehive and releases the honey using a gravity-activated arm. It swings an arm with the pig into the farm area. It catapults the seal camera back to base using an elastic band powered arm. The robot then drives off the attachment using a ramp which completes the panda mission using a passive arm. Finally, the robot drives to the biomimicry wall and hangs itself and the gecko. | 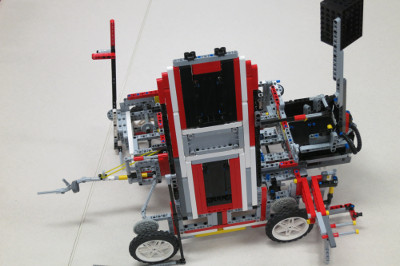 |
| Food Dispenser | This attachment delivers the food to 2 of the animals using an automatic dispenser. After the milk is dispensed, the attachment picks up the zoologist and puts it into the Training and Research Area. There is also a lifting arm that completes the animal conservation mission. | 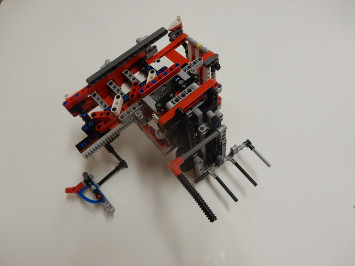 |
| Shark Platform | The shark is placed on the platform. The robot has an arm that sticks out to push the platform so that the shark is in the scoring position. | 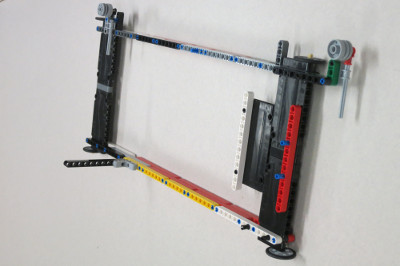 |
| Service Dog and Feeding | This attachment has wheels that raise the robot, allowing the robot to cross the fence. There is a motorized arm which releases all the food from the refrigerator. It also has an arm that lowers down to drag the bee, pig, and the basket that holds the food back to base. |  |
| The Giraffe | This attachment lowers an arm to deliver the basket that collects the food in front of the fridge. It relies on gravity to lower the arm. Once the basket is released, the arm springs back into base. This attachment also acts as a jig to line up the robot in base and the shark platform. |  |
| Gecko Hanger | This attachment hangs the robot onto the biomimicry wall with the gecko. It uses two worm gears to deliver enough force to lift up the robot without straining the motor and has a basket that puts the food in the fourth circle. | 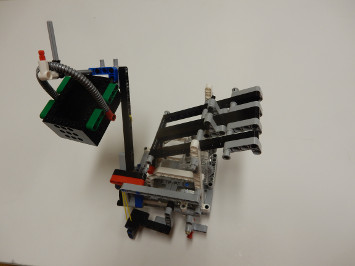 |